自動搬送ロボット(AMR)OTTO
OTTOの特徴
交通エリアの障害物を検知し
自律的に判断し安全に回避します
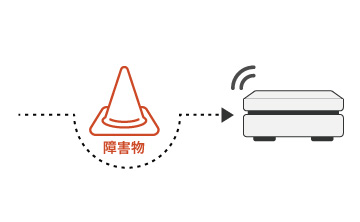
磁気テープなどの物理インフラ無しに、センサーで周囲の状況を判断し、障害物を回避して進みます。
1台が検知すればリアルタイムにマップを更新し、全ての自動搬送ロボットが障害物の存在を把握し、最適なルートを選択することが可能です。
モノを運び
人と自動化設備を繋げます

これまで人の手で繋いでいたプロセスを、OTTO AMRが繋げ、人の関与を減らします。
製造工場におけるセルや組み立てラインへの搬送を自動化したり、倉庫におけるピッキングから荷揃え場所への搬送など、活用は多岐に渡ります。
統合管理とプロセス改善のための
優れた管理システムを有します
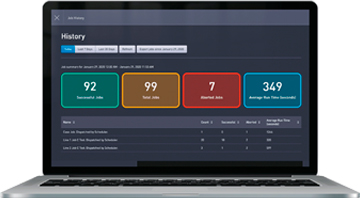
ロボット本体だけでは機能しません。
自動搬送ロボットのハードウェアとしての性能は、それを動かす頭脳(OS)と、それを指揮するマネジメントシステムが重要です。
OTTOはマテリアルハンドリングに特化し、
導入とプロセス改善を容易にする優れたシステムを有します。
高い効率性
(最高峰のペイロード)

最大1900kgの可搬重量で秒速2mという高スピードでの搬送が可能。
カーブでも機敏に動き、入組んだ経路を高速・スムーズに走行可能。
効率性で選ぶならOTTOです。
高い安全性

OTTOは人・他の設備・ロボットが共存する空間で安全なように設計されており、様々な工夫がなされています。
柔軟な再配置やスケール可能

OTTOはAGVと違い、各搬送ロボットの役割を簡単に変更可能です。
追加のハードウェアインフラ無しに拡張・再配置できるため、小規模導入から始めて拡大も容易です。
タブレットやPCでの
直感的な操作性
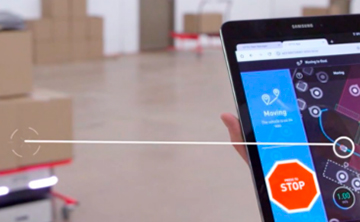
自動スケジューリングされたタスク以外でOTTOを呼ぶときには、タブレット等の端末で簡単操作で呼ぶことが可能です。
操作に特別なスキルは不要です。
頑丈で耐衝撃性に優れる
産業レベルのビルド

人が操作するタガーやフォークリフトと共存する上で、衝突も起こりえます。
ある程度の打撃を受けても故障することなく損傷に耐えるタフな造りです。
メンテナンスが容易
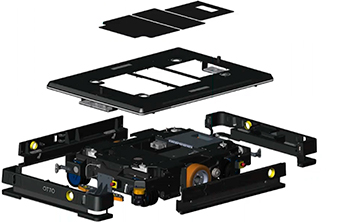
分解が容易で、メンテナンスしやすい構成です。
資料ダウンロード

自動搬送ロボット(AMR)OTTOカタログダウンロードはこちらから