自動搬送ロボット(AMR)OTTO
管理システム
自動搬送ロボット導入の効用を最大化する
マテリアルハンドリング専用の管理システム
OTTOのメーカーであるOTTO Motorsは、自らをデバイスメーカーの域を超えた「プロセス改善ベンダー」であると位置付けています。
OTTOの管理システムである「フリートマネージャー」は、多数の自動搬送ロボット(AMR)導入により得られたマテリアルハンドリングにおけるプロセス改善の知見に基づき開発・アップデートされ続けています。
管理システム(フリートマネージャー)の概要
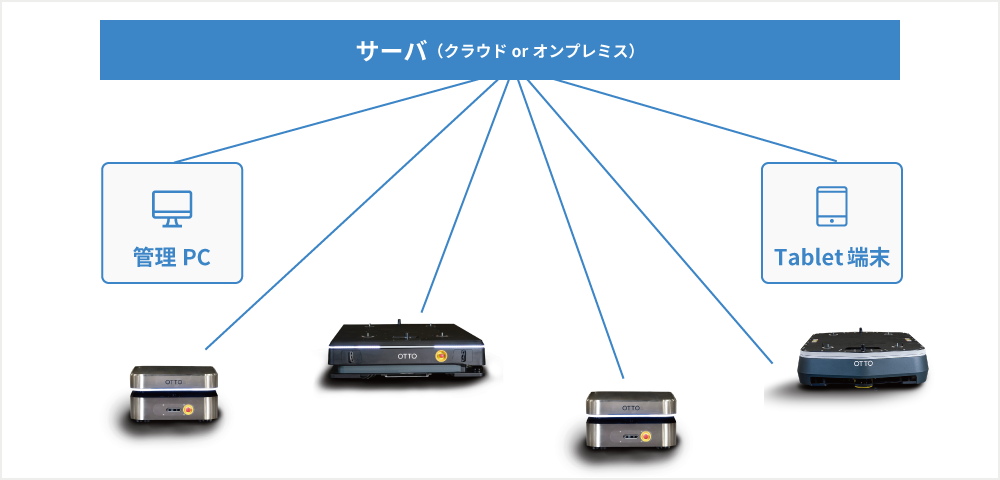
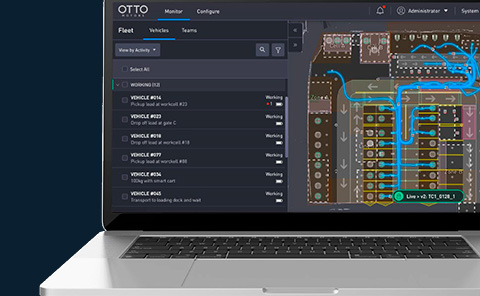
フリートマネージャーは、フリート(英訳:車両/艦隊を意味します)を一元管理するシステムです。
管理PCやタブレット端末を通して各端末を操作したり、運行状態のデータをモニタリングし、統計データを分析することが可能です。
直感的で使いやすい、
洗練されたインターフェイス
システムを監視し、操作する上で
システム画面の使いやすさは重要です。
直感的な操作により容易に管理が可能です。
フリートマネージャーの機能
交通ルールの設定
エリアを指定して、個別に下記のルール設定が可能です。
- 速度制限
- 進入禁止エリア
- 一次停車
- 交差点
- 通行を譲る際の優先度
- 一方通行
- 片側通行車線
- 人通りの多いエリア
- 徐行
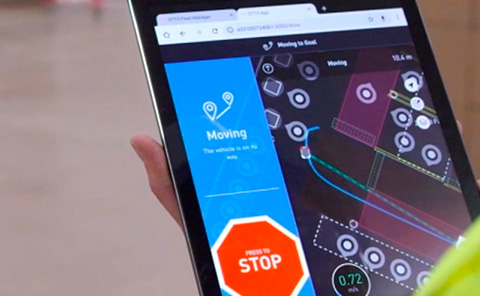
リアルタイムでの地図更新
AMRに搭載されたセンサーとカメラは、継続的なデータをサーバに送信し、常時地図を更新します。
例えば通路に障害物が配置された際に、即座に地図データが更新・共有されます。
AMRはその地図情報を元に障害物を避ける適切なルートを選択することができ、オペレーターはリアルタイムに地図を確認でき、問題解決や適切な対処をすることに役立てることが可能です。
ジョブスケジューリングと自動実行
予めスケジュールしておいた仕事を、最適なAMRに担当させることを自動化します。どのAMRに担当させるかという選択は、有効性とROIを高めるよう最適化されます。
最適化され実行されるジョブの例
- 充電(バッテリーが減って充電が必要なら自分で充電しにいく)
- ジョブを開始する上で、そのタイミングで場所が近いAMRをアサインする
- 負荷のサイズとタイプにより適切な車両をアサインする
- タスクを溜めておいてキューから実行。キューの状況により適切な車両をアサインする
- 車両に搭載されたアタッチメントの種類により適切な車両をアサインする
APIによる柔軟なシステム連携
予めスケジュールしておいた仕事を、最適なAMRに担当させることを自動化します。どのAMRに担当させるかという選択は、有効性とROIを高めるよう最適化されます。
インダストリー4.0を見越した様々なシステム連携を想定したAPI (Application Programming Interface)をご用意しております。
API連携により
基幹システム/ERP/WMS/SCADA/MES等の業務システムや、PLCと連動させることも可能です。
使用可能なAPIのプロトコル
- HTTPS REST
- Websocket
- OPC-UA Protocols
- lgnition
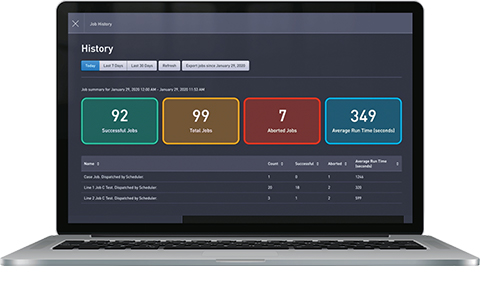
分析により搬送ロボットの
パフォーマンスとROIを改善する
データは様々な角度でドリルダウンして分析することが可能です。
- 車両ステータス
(稼働中、メンテナンス中、充電中、停車中) - ジョブの進捗
- ジョブの履歴
(成功したジョブ/中止されたジョブ) - 各ジョブの所要時間
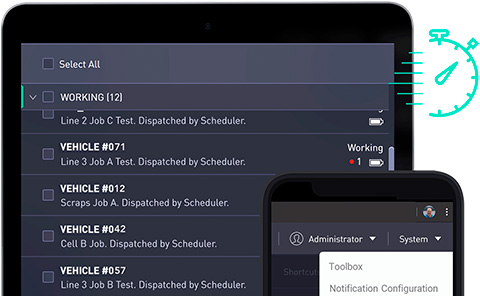
スマート通知

ミッションクリティカルな搬送プロセスを監視します。
監視したいイベントを設定しておくことで瞬時に通知を受けることが可能です。
その際、イベントログやプレイバック機能と合わせたトラブルシューティングが可能で、ワンクリックでOTTOのテクニカルサポートに問題解決のために送信することが可能です。
通知の種類
- SMS
- Eメール
- Slack
- その他の外部ツールやシステム
デジタルツインのプレイバック機能
イベント発生時の状況を画面上で再現し、
掘り下げて分析することが可能です。
ミッションクリティカルな搬送プロセスを監視します。
監視したいイベントを設定しておくことで瞬時に通知を受けることが可能です。 その際、イベントログやプレイバック機能と合わせたトラブルシューティングが可能で、ワンクリックでOTTOのテクニカルサポートに問題解決のために送信することが可能です。
イベント発生時の状況を画面上で再現し、
掘り下げて分析することが可能です。
資料ダウンロード

自動搬送ロボット(AMR)OTTOカタログダウンロードはこちらから